1.介绍
此项目用kinect V2捕捉人体动作,在window10电脑上用Processing3.5.4 处理Kinect的骨骼数据(此处用到Kinect PV2的库)并显示在电脑屏幕上.后续有两种方案。 案例一通过Arduino Uno 获取Processing 解析出来的坐标数据,从而传递控制信号给CNC Shield v3 和A4988,进行控制35步进电机进行皮影动作运行。此案例方案适用于简单的动作,复杂的运动由于Arduino Uno性能局限无法达到精度要求,故此案例只作为调试用途。 案例二通RISC-vduino 获取Processing 解析出来的坐标数据,从而传递控制信号给CNC Shield v3 和A4988,进行控制35步进电机进行皮影动作运行。 RISC-vduino 性能足够满足此项目,能实现复杂的运动跟踪.
故最终版我们使用的软硬件有以下
- kinect V2;
- Kinect for Windows SDK 2.0;
- Processing3.5.4 ;
- Kinect PV2;
- RISC-vduino ;
- CNC Shield v3 & A4988;
- 35步进电机;
2.准备工作
2.1硬件
- A Kinect for Windows v2 Device (K4W2):此硬件用于捕捉人体动作,Kinect分为Kinect for xbox和Kinect for windows,我们项目中使用Kinect for xbox,kinect for windows同样适用;
- Arduino UNO:测试时用于检测初步代码和功能;
- RISC-vduino:最终版本的电控核心,将从Processing3.5.4 获得的数据转化处理,从而将电机运转信号给CNC Shield;
- CNC Shield v3 & A4988;CNC Sheild是电机控制的载体,A4988为驱动电机控制板,是CNCshield的核心,将最终的放大信号传至35步进电机;
- 35步进电机;把获得的运行型号执行为旋转运动,从而推动丝杠上的滑块运行;
- 12V2A电源;
配件:联轴器,滑块,3d打印结构件,杜邦线,面包板;
2.2 软件
- Kinect for Windows SDK 2.0:此处用于搭建kinect 在PC端的运行环境和kinect的准备工作;
- Processing3.5.4 :通过和下面的Kinect PV2的库,将Kinect的信号转化成电脑的图像信号,并捕捉人体运动的关键坐标数据;
- Kinect PV2:Processing和Kinect连接后的获得人体骨骼数据的库文件
- Arduino IDE:测试阶段(案例一)的控制程序的软件,此软件和Arduino Uno连接,从而控制电机运动;
- MounRiver Studio V1.3.0:最终阶段(案例二)的控制程序的软件,此软件和RISC-vduino连接,从而控制电机运动;
2.3 kinect 运行环境
2.3.1 Windows10电脑
- Windows10 64位电脑;
- 拥有USB3.0;
- 确定升级最新的显卡驱动,此处根据实际电脑配置进行
- 确定是否安装 DirectX 11;
2.3.2 Kinect SDK
我们的硬件使用的的是Kinect v2 for xbox, 所以SDK使用 Kinect SDK1.8,如果使用者使用Kinect v2 for Windows,推荐使用 Kinect SDK v2
- 安装SDK 前需要拔掉Kinect;
- 安装Kinect SDK1.8;
- 安装 Kinect for Windows Developer Toolkit v1.8,这是sdk的一个工具箱,里面有很多丰富的例子。可以不安装,推荐安装;
- 检测驱动:插上kinect,跑Developer Toolkit里面的任意例子,正常说明kinect设备能驱动了,反之没有。
2.3.3 Processing
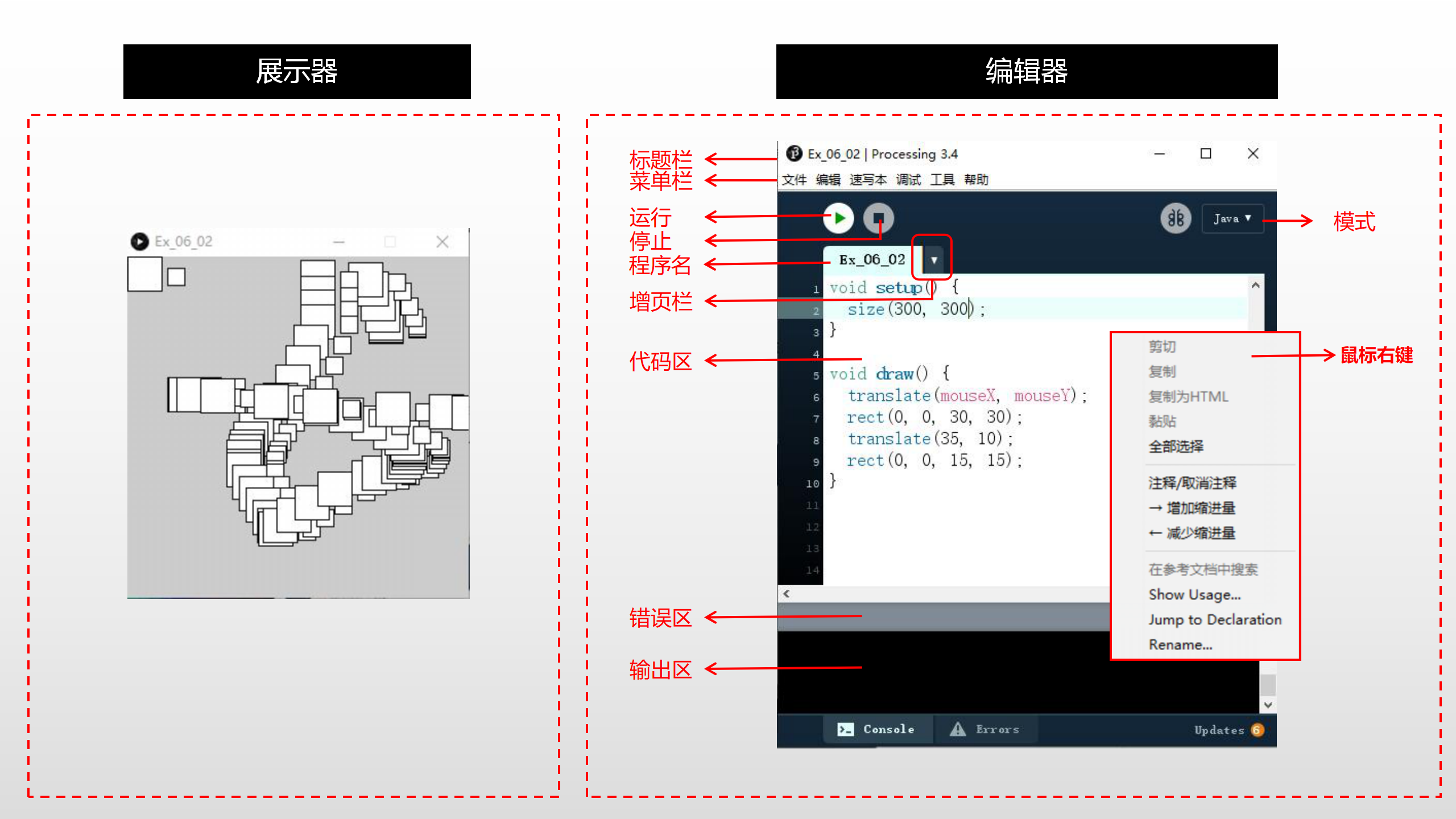
- 在官网选择适合你电脑的版本,我们目前使用 Processing 3.5.4,下载并且解压压缩包。Windows用户找到processing.exe便可以运行。
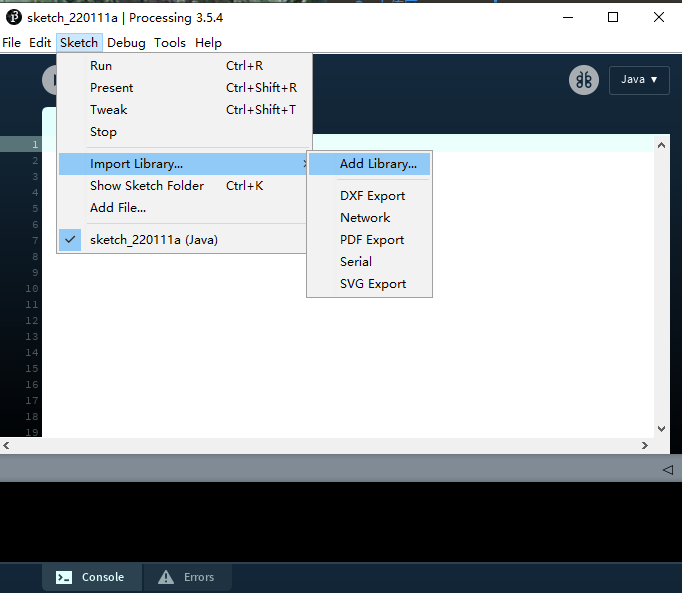
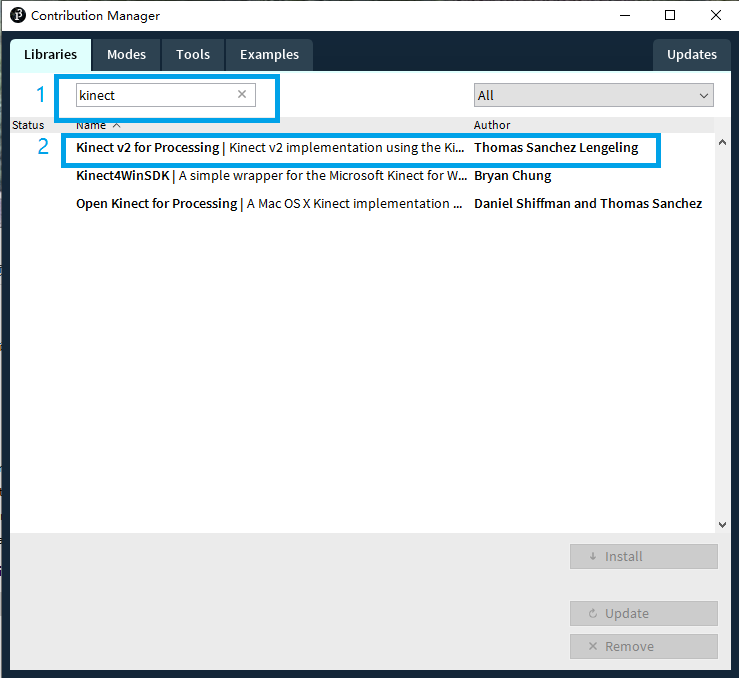
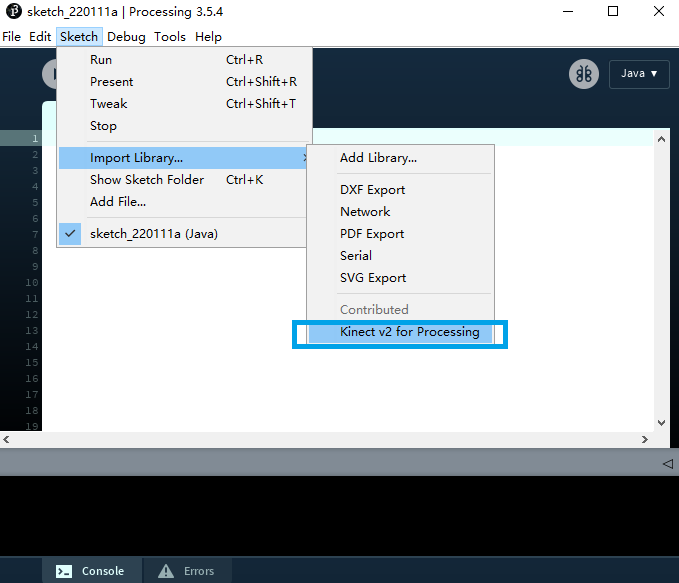
- Processing中安装Kinect v2 library for Processing,在Sketch-Import library-Add Library中搜索并安装
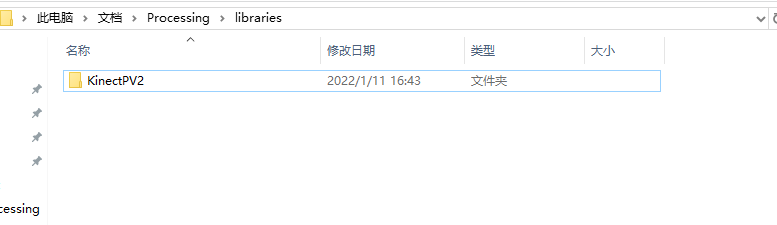
 另外可以在github上下载Kinect v2 library for Processing并解压缩放到安装目录的library内“C:\Users\Documents\Processing\libraries”,
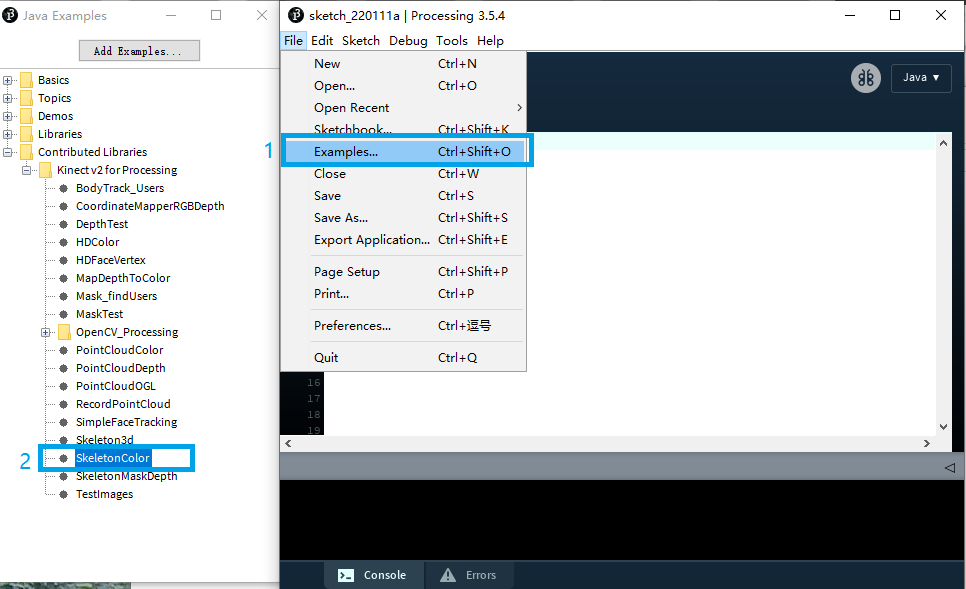
安装完成后在文档目录和软件中分别显示为以下
另外可以在github上下载Kinect v2 library for Processing并解压缩放到安装目录的library内“C:\Users\Documents\Processing\libraries”,
安装完成后在文档目录和软件中分别显示为以下
- 运行“Skeleton color”测试软件环境是否成功
 如果程序运行类似上图能显示人体骨骼,说明Kinect和processing的安装环境成功
如果程序运行类似上图能显示人体骨骼,说明Kinect和processing的安装环境成功
3.测试
我们会用两步去测试,如果大家熟悉RISC-Vduino,可以直接到 “3.2案例二(Kinect+Processing+RISC-Vduino test)”
3.1 案例一(Kinect+Processing+Arduino test)
Arduino UNO下载安装Arduino IDE,测试Arduino IDE 案例看是否成功。 接下来正式的程序,我们目标是以下几点
- 将用Processing 程序去和Kinect连接,读取人体手掌相对于脖颈的坐标位置;
- 坐标位置写成string通过串口传至Arduino Uno;
- Arduino Uno将string值解析成电机转动数值;
- Arduino Uno通过CNC Shield v3+A4988驱动35步进电机的运行,从而做出对应动作
以下为processing程序
import KinectPV2.KJoint;
import KinectPV2.*;
import processing.serial.*;
Serial port;
KinectPV2 kinect;
//int value_X1;
//int value_Y1;
//int value_Z1;
//int value_X2;
//int value_Y2;
//int value_Z2;
//int value_running=0;
String [] strs;
String data;
void setup() {
size(1920, 1080, P3D);
port=new Serial(this,"COM4",9600);
kinect = new KinectPV2(this);
kinect.enableSkeletonColorMap(true);
kinect.enableColorImg(true);
kinect.init();
}
void draw() {
background(0);
image(kinect.getColorImage(), 0, 0, width, height);
ArrayList<KSkeleton> skeletonArray = kinect.getSkeletonColorMap();
//individual JOINTS
for (int i = 0; i < skeletonArray.size(); i++) {
KSkeleton skeleton = (KSkeleton) skeletonArray.get(i);
if (skeleton.isTracked()) {
KJoint[] joints = skeleton.getJoints();
color col = skeleton.getIndexColor();
fill(col);
stroke(col);
drawBody(joints);
//test
float X0= joints[ KinectPV2.JointType_Neck].getX()- joints[KinectPV2.JointType_SpineBase].getX();
float Y0= joints[ KinectPV2.JointType_Neck].getY()- joints[KinectPV2.JointType_SpineBase].getY();
float Z0= joints[ KinectPV2.JointType_Neck].getZ()- joints[KinectPV2.JointType_SpineBase].getZ();
float A1= joints[ KinectPV2.JointType_Neck].getX()- joints[KinectPV2.JointType_HandRight].getX();
float B1= joints[ KinectPV2.JointType_Neck].getY()- joints[KinectPV2.JointType_HandRight].getY();
float C1= joints[ KinectPV2.JointType_Neck].getZ()- joints[KinectPV2.JointType_HandRight].getZ();
int value_X1 =int((abs((A1)*100/(X0))));
int value_Y1 =int(abs((B1)*100/(Y0)));
int value_Z1 =int(abs((C1)*100/(Z0)));
float A2= joints[ KinectPV2.JointType_Neck].getX()- joints[KinectPV2.JointType_HandLeft].getX();
float B2= joints[ KinectPV2.JointType_Neck].getY()- joints[KinectPV2.JointType_HandLeft].getY();
float C2= joints[ KinectPV2.JointType_Neck].getZ()- joints[KinectPV2.JointType_HandLeft].getZ();
int value_X2 =int((abs((A2)*100/(X0))));
int value_Y2 =int(abs((B2)*100/(Y0)));
int value_Z2 =int(abs((C2)*100/(Z0)));
text("X1=",20, 150);text(value_X1, 50, 150);text("Y1=",120, 150); text(value_Y1, 150, 150);text("Z1=",220, 150);text(value_Z1, 250, 150);
text("X2=",20, 250);text(value_X2, 50, 250);text("Y2=",120, 250); text(value_Y2, 150, 250);text("Z2=",220, 250);text(value_Z2, 250, 250);
strs=new String[6];
strs[0]=str(int((abs((A1)*100/(X0)))));
strs[1]=str(int((abs((B1)*100/(X0)))));
strs[2]=str(int((abs((C1)*100/(X0)))));
strs[3]=str(int((abs((A2)*100/(X0)))));
strs[4]=str(int((abs((B2)*100/(X0)))));
strs[5]=str(int((abs((C2)*100/(X0)))));
data =join(strs,"a");
//test
//draw different color for each hand state
drawHandState(joints[KinectPV2.JointType_HandRight]);
drawHandState(joints[KinectPV2.JointType_HandLeft]);
drawHandState(joints[KinectPV2.JointType_Neck]);
}
}
fill(0, 255, 0);
text(frameRate, 50, 50);
}
//DRAW BODY
void drawBody(KJoint[] joints) {
drawBone(joints, KinectPV2.JointType_Head, KinectPV2.JointType_Neck);
drawBone(joints, KinectPV2.JointType_Neck, KinectPV2.JointType_SpineShoulder);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_SpineMid);
drawBone(joints, KinectPV2.JointType_SpineMid, KinectPV2.JointType_SpineBase);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_ShoulderRight);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_ShoulderLeft);
drawBone(joints, KinectPV2.JointType_SpineBase, KinectPV2.JointType_HipRight);
drawBone(joints, KinectPV2.JointType_SpineBase, KinectPV2.JointType_HipLeft);
// Right Arm
drawBone(joints, KinectPV2.JointType_ShoulderRight, KinectPV2.JointType_ElbowRight);
drawBone(joints, KinectPV2.JointType_ElbowRight, KinectPV2.JointType_WristRight);
drawBone(joints, KinectPV2.JointType_WristRight, KinectPV2.JointType_HandRight);
drawBone(joints, KinectPV2.JointType_HandRight, KinectPV2.JointType_HandTipRight);
drawBone(joints, KinectPV2.JointType_WristRight, KinectPV2.JointType_ThumbRight);
// Left Arm
drawBone(joints, KinectPV2.JointType_ShoulderLeft, KinectPV2.JointType_ElbowLeft);
drawBone(joints, KinectPV2.JointType_ElbowLeft, KinectPV2.JointType_WristLeft);
drawBone(joints, KinectPV2.JointType_WristLeft, KinectPV2.JointType_HandLeft);
drawBone(joints, KinectPV2.JointType_HandLeft, KinectPV2.JointType_HandTipLeft);
drawBone(joints, KinectPV2.JointType_WristLeft, KinectPV2.JointType_ThumbLeft);
// Right Leg
drawBone(joints, KinectPV2.JointType_HipRight, KinectPV2.JointType_KneeRight);
drawBone(joints, KinectPV2.JointType_KneeRight, KinectPV2.JointType_AnkleRight);
drawBone(joints, KinectPV2.JointType_AnkleRight, KinectPV2.JointType_FootRight);
// Left Leg
drawBone(joints, KinectPV2.JointType_HipLeft, KinectPV2.JointType_KneeLeft);
drawBone(joints, KinectPV2.JointType_KneeLeft, KinectPV2.JointType_AnkleLeft);
drawBone(joints, KinectPV2.JointType_AnkleLeft, KinectPV2.JointType_FootLeft);
//data we need
fill(0, 255, 2255);
strokeWeight(10);
stroke(0,0,0);
drawBone(joints, KinectPV2.JointType_Neck, KinectPV2.JointType_HandRight);
drawBone(joints, KinectPV2.JointType_Neck, KinectPV2.JointType_HandLeft);
drawJoint(joints, KinectPV2.JointType_HandLeft);
drawJoint(joints, KinectPV2.JointType_HandRight);
drawJoint(joints, KinectPV2.JointType_Neck);
//drawJoint(joints, KinectPV2.JointType_FootLeft);
//drawJoint(joints, KinectPV2.JointType_FootRight);
//drawJoint(joints, KinectPV2.JointType_ThumbLeft);
// drawJoint(joints, KinectPV2.JointType_ThumbRight);
//drawJoint(joints, KinectPV2.JointType_Head);
}
//draw joint
void drawJoint(KJoint[] joints, int jointType) {
pushMatrix();
translate(joints[jointType].getX(), joints[jointType].getY(), joints[jointType].getZ());
ellipse(0, 0, 25, 25);
popMatrix();
}
//draw bone
void drawBone(KJoint[] joints, int jointType1, int jointType2) {
stroke(255,255,0);
pushMatrix();
translate(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ());
//text(joints[jointType1].getX(),50,50);
ellipse(0, 0, 25, 25);
popMatrix();
line(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ(), joints[jointType2].getX(), joints[jointType2].getY(), joints[jointType2].getZ());
pushMatrix();
translate(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ());
//text(joints[jointType1].getX(),50,50);
ellipse(0, 0, 25, 25);
popMatrix();
stroke(0);
fill(0);
line(joints[ KinectPV2.JointType_Neck].getX(), joints[ KinectPV2.JointType_Neck].getY(), joints[ KinectPV2.JointType_Neck].getZ(), joints[KinectPV2.JointType_SpineBase].getX(), joints[KinectPV2.JointType_SpineBase].getY(), joints[KinectPV2.JointType_SpineBase].getZ());
stroke(255,0,255);
line(joints[ KinectPV2.JointType_Neck].getX(), joints[ KinectPV2.JointType_Neck].getY(), joints[ KinectPV2.JointType_Neck].getZ(), joints[KinectPV2.JointType_HandRight].getX(), joints[KinectPV2.JointType_HandRight].getY(), joints[KinectPV2.JointType_HandRight].getZ());
line(joints[ KinectPV2.JointType_Neck].getX(), joints[ KinectPV2.JointType_Neck].getY(), joints[ KinectPV2.JointType_Neck].getZ(), joints[KinectPV2.JointType_HandLeft].getX(), joints[KinectPV2.JointType_HandLeft].getY(), joints[KinectPV2.JointType_HandLeft].getZ());
}
//draw hand state
void drawHandState(KJoint joint) {
noStroke();
handState(joint.getState());
pushMatrix();
translate(joint.getX(), joint.getY(), joint.getZ());//text(joint.getX(), 50,0);
ellipse(0, 0, 70, 70);
popMatrix();
}
/*
Different hand state
KinectPV2.HandState_Open
KinectPV2.HandState_Closed
KinectPV2.HandState_Lasso
KinectPV2.HandState_NotTracked
*/
void handState(int handState) {
switch(handState) {
case KinectPV2.HandState_Open:
fill(0, 255, 0);
println("open");
break;
case KinectPV2.HandState_Closed:
fill(255, 0, 0);
println(data);
port.write(data);
delay(1000);
//value_running=0;
//get cordination
break;
case KinectPV2.HandState_Lasso:
fill(0, 0, 255);
break;
case KinectPV2.HandState_NotTracked:
fill(255, 255, 255);
break;
}
}
3.2 案例二(Kinect+Processing+RISC-Vduino test)
RISC-vduino:最终版本的电控核心,将从Processing3.5.4 获得的数据转化处理,从而将电机运转信号给CNC Shield;